Las Leyes de Newton,
también conocidas como Leyes del movimiento de Newton,1 son tres principios a
partir de los cuales se explican la mayor parte de los problemas planteados por
la dinámica, en particular aquellos relativos al movimiento de los cuerpos.
Revolucionaron los conceptos básicos de la física y el movimiento de los
cuerpos en el universo, en tanto que Constituyen los cimientos
no sólo de la dinámica clásica sino también de la física clásica en general.
Aunque incluyen ciertas definiciones y en cierto sentido pueden verse como
axiomas, Newton afirmó que estaban basadas en observaciones y experimentos
cuantitativos; ciertamente no pueden derivarse a partir de otras relaciones más
básicas. La demostración de su validez radica en sus predicciones… La validez
de esas predicciones fue verificada en todos y cada uno de los casos durante
más de dos siglos.
En concreto, la relevancia
de estas leyes radica en dos aspectos:
Por un lado, constituyen,
junto con la transformación de Galileo, la base de la mecánica clásica;
Por otro, al combinar estas
leyes con la Ley de la gravitación universal, se pueden deducir y explicar las
Leyes de Kepler sobre el movimiento planetario.
Las 3 Leyes físicas, junto
con la Ley de Gravitación Universal formuladas por Sir Isaac Newton, son la
base fundamental de la Física Moderna.
Así, las Leyes de Newton
permiten explicar tanto el movimiento de los astros, como los movimientos de
los proyectiles artificiales creados por el ser humano, así como toda la
mecánica de funcionamiento de las máquinas.
PRIMERA
LEY O LEY DE INERCIA
Todo cuerpo permanece en su
estado de reposo o de movimiento rectilíneo uniforme a menos que otros cuerpos
actúen sobre él.
SEGUNDA
LEY O PRINCIPIO FUNDAMENTAL DE LA DINÁMICA
La fuerza que actúa sobre
un cuerpo es directamente proporcional a su aceleración.
TERCERA
LEY O PRINCIPIO DE ACCIÓN-REACCIÓN
Cuando un cuerpo ejerce una
fuerza sobre otro, éste ejerce sobre el primero una fuerza igual y de sentido
opuesto.
Primera Ley o Ley de la Inercia
La primera ley del
movimiento rebate la idea aristotélica de que un cuerpo sólo puede mantenerse
en movimiento si se le aplica una fuerza. Newton expone que:
Todo cuerpo persevera en su
estado de reposo o movimiento uniforme y rectilíneo a no ser que sea obligado a
cambiar su estado por fuerzas impresas sobre él.
La primera ley de Newton,
conocida también como Ley de inercia, nos dice que si sobre un cuerpo no actúa
ningún otro, este permanecerá indefinidamente moviéndose en línea recta con
velocidad constante (incluido el estado de reposo, que equivale a velocidad
cero).
Como sabemos, el movimiento
es relativo, es decir, depende de cuál sea el observador que describa el movimiento.
Así, para un pasajero de un
tren, el interventor viene caminando lentamente por el pasillo del tren,
mientras que para alguien que ve pasar el tren desde el andén de una estación,
el interventor se está moviendo a una gran velocidad. Se necesita, por tanto,
un sistema de referencia al cual referir el movimiento.
Segunda ley de Newton o Ley de
fuerza
La segunda ley del
movimiento de Newton dice que el cambio de movimiento es proporcional a la
fuerza motriz impresa y ocurre según la línea recta a lo largo de la cual
aquella fuerza se imprime.
La Primera ley de Newton
nos dice que para que un cuerpo altere su movimiento es necesario que exista
algo que provoque dicho cambio. Ese algo es lo que conocemos como fuerzas.
Estas son el resultado de la acción de unos cuerpos sobre otros.
La Segunda ley de Newton se
encarga de cuantificar el concepto de fuerza. Nos dice que la fuerza neta
aplicada sobre un cuerpo es proporcional a la aceleración que adquiere dicho
cuerpo. La constante de proporcionalidad es la masa del cuerpo, de manera que
podemos expresar la relación de la siguiente manera:
F = m a
Tanto la fuerza como la
aceleración son magnitudes vectoriales, es decir, tienen, además de un valor,
una dirección y un sentido. De esta manera, la Segunda ley de Newton debe
expresarse como:
F = m a
La unidad de fuerza en el
Sistema Internacional es el Newton y se representa por N. Un Newton es la
fuerza que hay que ejercer sobre un cuerpo de un kilogramo de masa para que
adquiera una aceleración de 1 m/s2, o sea,
1 N = 1 Kg · 1 m/s2
Tercera Ley de Newton o Ley de
acción y reacción
Con toda acción ocurre
siempre una reacción igual y contraria: o sea, las acciones mutuas de dos
cuerpos siempre son iguales y dirigidas en sentido opuesto.
La tercera ley es
completamente original de Newton (pues las dos primeras ya habían sido
propuestas de otras maneras por Galileo, Hooke y Huygens) y hace de las leyes
de la mecánica un conjunto lógico y completo. Expone que por cada fuerza que
actúa sobre un cuerpo, este realiza una fuerza de igual intensidad y dirección,
pero de sentido contrario sobre el cuerpo que la produjo. Dicho de otra forma,
las fuerzas, situadas sobre la misma recta, siempre se presentan en pares de
igual magnitud y opuestas en sentido.
Tal como comentamos en al
principio de la Segunda ley de Newton las fuerzas son el resultado de la acción
de unos cuerpos sobre otros. La tercera ley, también conocida como Principio de
acción y reacción nos dice esencialmente que si un cuerpo A ejerce una acción
sobre otro cuerpo B, éste realiza sobre A otra acción igual y de sentido
contrario.
Ejemplos de Leyes de Newton en
Fenómenos Biológicos
Primer Ley
De Newton:
Todo objeto continúa en su estado de reposo o de
movimiento uniforme en línea recta, a menos que sea obligado a cambiar ese
estado por fuerzas que actúen sobre él.
Segunda Ley
De Newton:
La aceleración de un objeto es directamente
proporcional a la fuerza neta que actúa sobre él, tiene la dirección de la
fuerzan eta y es inversamente proporcional a la más del objeto.
Tercer Ley
De Newton:
Siempre que un objeto ejerce una fuerza sobre un
segundo objeto, el segundo objeto ejerce una fuerza de igual magnitud y
dirección opuesta sobre el primero.
1. El
cuerpo al transpirar
Ø
1era
Ley de Newton: El cuerpo al estar en un estado de reposo, la
temperatura se encuentra en un estado equilibrio.
Ø
2da
Ley de Newton: Al tener un aumento de temperatura corporal debido al calor de condiciones externas, o a nivel
interno, por ejemplo, por hacer
actividad física se produce un cambio en las condiciones normales de
termorregulación del cuerpo.
Ø
3ra
Ley de Newton: Debido a la acción que estimulo el aumento de
temperatura ya sea este externo o interno, se produce una reacción en la cual nuestro cuerpo intentará enfriarse nuevamente mediante la transpiración, lo cual
acompañado con el aire del exterior hará que nuestro cuerpo pierda energía a
manera de calor para luego intentar volver a un equilibrio .
2. Al
respirar ,capacidades pulmonares
Ø
1era
Ley de Newton: Dentro de los pulmones al estar en un estado de
reposo se obtendrán un volumen corriente de 500cc. Con una capacidad de 2300cc.
Ø
2da
Ley de Newton: Al realizar una gran inspiración causara que
se realiza una mayor contracción muscular causando un que la capacidad pulmonar
aumente a 3500 cc.
Ø
3ra
Ley de Newton: Debido a la diferencia de presiones, los
músculos respiratorios se relajan provocando un volumen de reserva espiratorio
de 110 cc.
3.
La descomposición de la comida dentro del estómago
Ø
1era
Ley de Newton: En el momento el cual el estómago está a la espera
de la llegada de la comida permanece en un estado inter-digestivo, donde no se
produce ninguna clase de secreción ácida (ácido Clorhídrico).
 Ø
2da
Ley de Newton: Cuando la comida baja por el tubo digestivo y
entra en contacto con el estómago esto causará la distensión de la mucosa, lo
cual empezará a actuar los quimiorreceptores y se estimulará la secreción de
ácido y pepsinógeno que es convertido en pepsina.
Ø
2da
Ley de Newton: Cuando la comida baja por el tubo digestivo y
entra en contacto con el estómago esto causará la distensión de la mucosa, lo
cual empezará a actuar los quimiorreceptores y se estimulará la secreción de
ácido y pepsinógeno que es convertido en pepsina.
Ø
3ra
Ley de Newton: Debido a la acción que provoco la liberación de
ácidos y enzimas se produce la reacción que sería la descomposición
química de los alimentos y la degradación proteica, dada por la enzima pepsina.
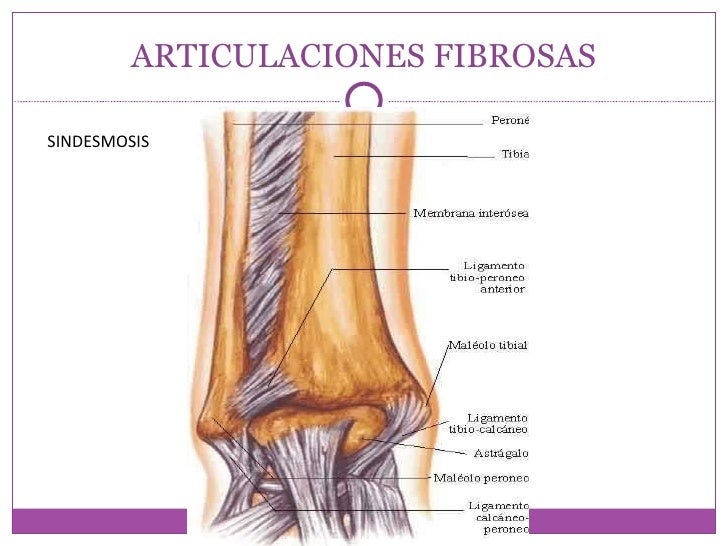
 2. Sínfisis: El material de conexión es un disco
ancho y plano de fibrocartílago; se encuentra entre los cuerpos de las
vértebras, una porción del disco intervertebral es material cartilaginoso. Desde
el punto de vista funcional son anfiartrosis. Ejemplo: la sínfisis del pubis.
2. Sínfisis: El material de conexión es un disco
ancho y plano de fibrocartílago; se encuentra entre los cuerpos de las
vértebras, una porción del disco intervertebral es material cartilaginoso. Desde
el punto de vista funcional son anfiartrosis. Ejemplo: la sínfisis del pubis.


 En los mamíferos (y en los
vertebrados en general), se puede encontrar predominantemente allí donde el
tejido sufre repetidos ciclos de extensión-relajación. Ejemplos típicos son las
arterias, ligamentos, pulmones y piel. Presenta unas sorprendentes cualidades
elásticas, quizá la más llamativa sea su alta resistencia a la fatiga. Las
fibras elásticas de las arterias humanas (especialmente del arco aórtico)
sobreviven más de 60 años, soportando miles de millones de ciclos de
extensión-relajación.
En los mamíferos (y en los
vertebrados en general), se puede encontrar predominantemente allí donde el
tejido sufre repetidos ciclos de extensión-relajación. Ejemplos típicos son las
arterias, ligamentos, pulmones y piel. Presenta unas sorprendentes cualidades
elásticas, quizá la más llamativa sea su alta resistencia a la fatiga. Las
fibras elásticas de las arterias humanas (especialmente del arco aórtico)
sobreviven más de 60 años, soportando miles de millones de ciclos de
extensión-relajación.



 Ø
2da
Ley de Newton: Cuando la comida baja por el tubo digestivo y
entra en contacto con el estómago esto causará la distensión de la mucosa, lo
cual empezará a actuar los quimiorreceptores y se estimulará la secreción de
ácido y pepsinógeno que es convertido en pepsina.
Ø
2da
Ley de Newton: Cuando la comida baja por el tubo digestivo y
entra en contacto con el estómago esto causará la distensión de la mucosa, lo
cual empezará a actuar los quimiorreceptores y se estimulará la secreción de
ácido y pepsinógeno que es convertido en pepsina.